역대 수상작
게시물 보기
|
|||
| 수상명 | 입선 | ||
|---|---|---|---|
| 출품명 | HERMES-험난한 지형 극복을 위한 확장형 바퀴 | ||
| TITLE | HERMES | ||
| 출품자 | LISHUN | 이메일 | gadeneasun@gmail.com |
| 출품부문 | 제품디자인 | 출품자구분 | 학생 |
| 접수번호 | 13SM0230 | 조회수 | 499 |
| 출품설명 | |||
|
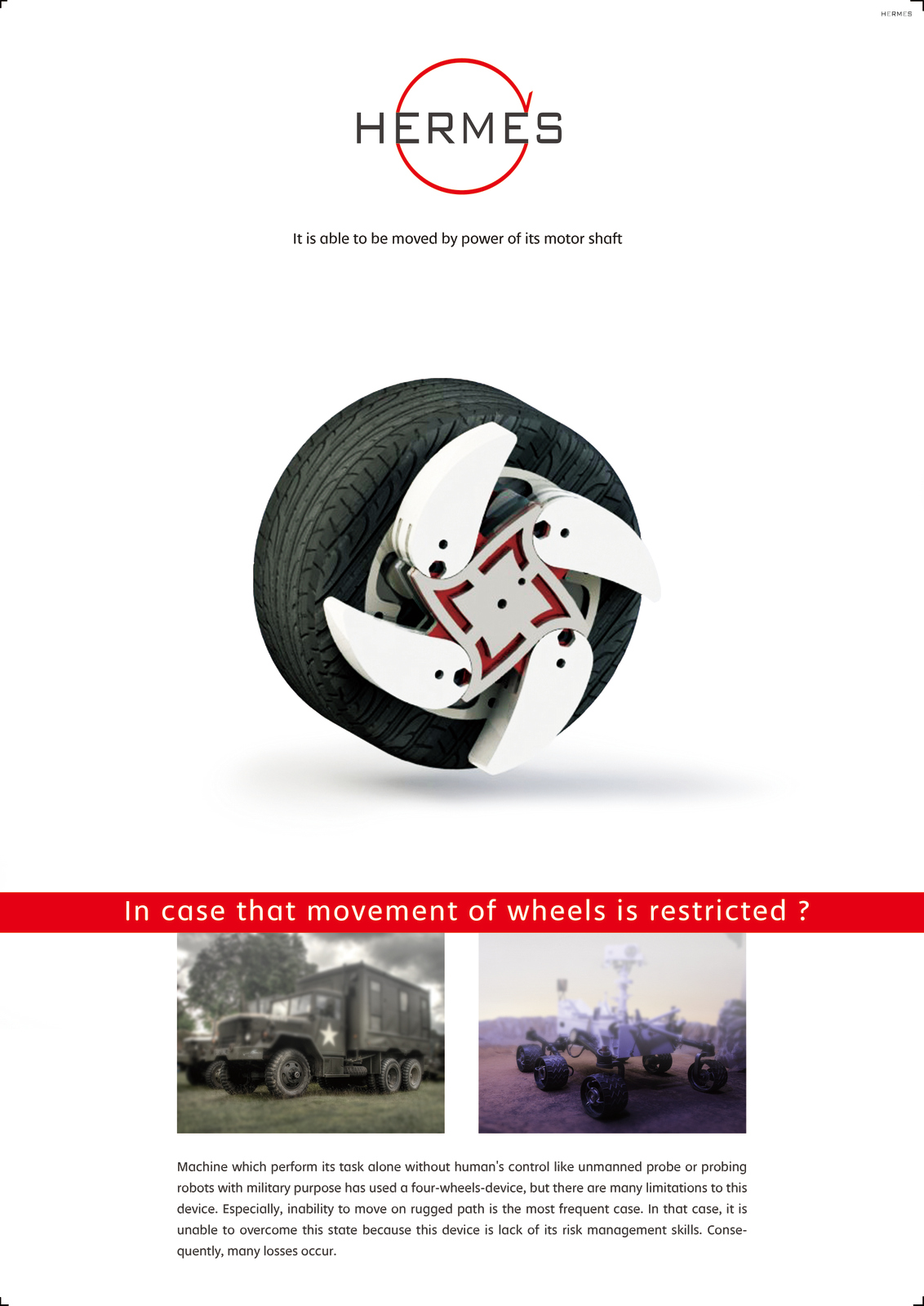
무인우주선이나 군용탐사로봇처럼 인간의 조종없이 홀로 임무를 수행하는 무인장치에는 사륜구동 장치를 이용하고있는데 이 사륜구동 장치가 한계점을 보이는 상황이 매우 많다. 특히, 험난한 지형에서 이동을 잘 할수없는 경우가 가장 큰 경우이다. 이러한 이동불능의 경우 무인 사륜구동 장치의 위기 대처 능력의 한계가 있어 이 상태를 벗어나는 것이 불가능하게 되고 이로인해 다양한 손해가 발생한다. 험난한 지형에 의해 바퀴의 움직임이 제한을 받을수 있는 상황에서 모터 축으로부터 동력을 받은 링크 디스크 연결 축이 회전하게 되며 이 때 제 2링크와 체결된 부위도 같이 회전하게 된다. 제 2링크는 이 회전운동을 직선운동으로 바꿔주며 제 2링크에 체결된 제1링크는 받은 힘으로 확장형 날개를 확장시킨다. 이 확장형 날개를 이용해 무인 사륜구동장치의 이동불능상태를 해결한다. |
|||
| DESCRIPTION | |||
|
Machine which perform its task alone without human's control like unmanned probe or probing robots with military purpose has used a four-wheels-device, but there are many limitations to this device. Especially, inability to move on rugged path is the most frequent case. In that case, it is unable to overcome this state because this device is lack of its risk management skills. Consequently, many losses occur. In case that movement of wheels is restricted by rugged path, link disk connecting shaft powered by moter shaft rotates, so joint which connect it with the second link rotates at the same time. This link converts rotational motion into linear motion and the fist link connected to the second link has spreading wheels spread by using provided power. With using this spreading wheels, it is able to resolve immovable state of unmanned four-wheels-device. |
|||